 «Магнитная Мышь»
«Магнитная Мышь»
Адрес страницы: http://antiradio.narod.ru/expo/mmouse/
Дата создания: 08.10.2008. Последнееобновление: 08.10.2008.
«Магнитная Мышь»Материалы по этому устройству сохранились только потому, что на тот момент появились первые системы автоматизированного проектирования AutoCAD и PCAD (в DOS-овском исполнении), с помощью которых были созданы рисунки и схемы.
В серийно выпускаемых мышах используется преобразование катательного движения шарика во вращение оптических решеток в двух разных плоскостях. Количество световых импульсов подсчитывается счетчиками и в цифровом виде передается в компьютер.
Принцип работы предлагаемого мыша основан на зависимости наводимой в приемной катушке э.д.с. от коэффициента ее перекрытия с передающей катушкой. При этом пара приемных катушек находится в планшете-«коврике», а передающая катушка и ВЧ-генератор – в самом мыше. Далее по команде компьютера амплитуды принятых сигналов (соответствующих координатам X и Y) преобразуются в импульсы с изменяемой длительностью, которая и измеряется, а результат передается в рабочую программу.
Электрическая схема устройства показана на Рис.1. На транзисторе VT1 и катушке L1 собран генератор переменного магнитного поля. Режим работы определяется резистором R1, потребляемый ток составляет порядка 2 мА, частота генерации – около 100 кГц. Резисторы R2 и R9 предохраняет цепи питания компьютера от всяческих нештатных ситуаций.
Переменное магнитное поле в приемных катушках L2 и L3 создает э.д.с., величина которой зависит от положения передающей катушки относительно витков приемных катушек. На Рис.2а показан случай, когда катушки имеет форму колец. Видно, что рабочий участок получается существенно нелинейным – в точке пересечения витков наблюдается крутая зависимость, приводящая к чрезмерной чувствительности мыша, а также имеется паразитный участок, обусловленный дипольными свойствами катушек. Кроме того, э.д.с. зависит и от перемещения по другой координате – Y, но это влияние можно уменьшить, выполнив катушку в виде прямоугольной рамки, у которой горизонтальные участки разнесены на максимально возможное расстояние.
|
|
|
Для линеаризации характеристики « рабочую» сторону рамки можно рассредоточить в некоторой области dX, как это показано на Рис.2б. Дальнейшее улучшение линейности и подавление паразитного участка возможно с помощью подачи на вход приемника небольшого синфазного напряжения, смещающее характеристику вверх (Рис.2б). Выбором величины напряжения смещения и порога чувствительности приемника можно полностью ликвидировать паразитный участок. Для измерения координат используются две катушки, повернутые друг относительно друга на 90o. Каналы приемников полностью идентичны, работа одного канала заключается в следующем.
Сигнал с приемной катушки L2, к которому прибавляется напряжение смещения (снимаемое с части витков катушки генератора L1), поступает на вход управляемого источника тока, выполненного на транзисторе VT2. Величина тока пропорциональна входному сигналу, а порог чувствительности определяется резистором R4. Этот источник тока заряжает конденсатор C5 до уровня открытия транзистора VT3 (около 1 В), при котором логический уровень на линии X сменится с 1 на 0. Перед тем, как производить отсчет времени, компьютер должен разрядить конденсатор – для этого на линию START кратковременно подается низкий логический уровень. Резистор R6 ограничивает разрядный ток до безопасного уровня. В течение цикла опроса программа подсчитывает, как долго линия X находилась в состоянии лог.0, и в итоге выдает число, пропорциональное времени зарядки конденсатора, которое в свою очередь будет пропорционально величине сигнала на приемной катушке, а следовательно – координате.
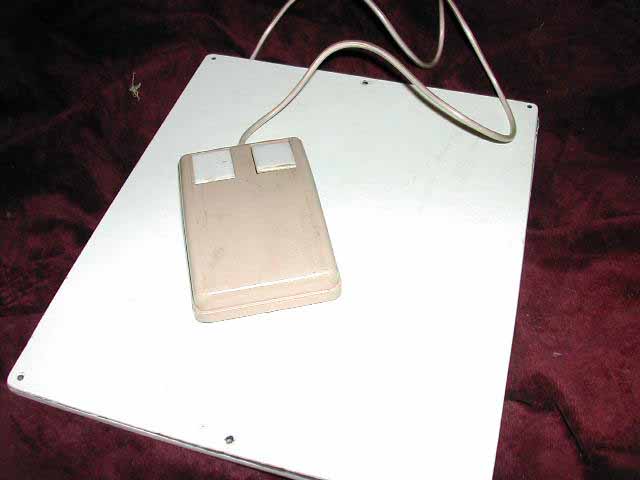
ВЧ-генератор вместе с катушкой L1 и кнопками собирался на печатной плате и помещался в небольшую коробочку, которая соединялась
с планшетом гибким кабелем (Рис.3). Остальные элементы монтировались на тонкой печатной плате с использованием
поверхностного монтажа. Плата помещалась внутрь планшета (приклеивалась к его основанию). Конструкцию удалось сделать максимально
плоской: высота монтажа 3 мм, а толщина планшета – всего 6 мм.
Катушка L1 наматывалась на каркасе диаметром 18 и высотой 5 мм проводом диаметром 0,2мм и имела 34 витка с отводами от 8-го и 30-го витков, считая снизу. В качестве каркаса и сердечника служило кольцо из феррита М2000НМ 17,5х8х5 (витки наматывались на боковую поверхность).
Наиболее трудоемкая операция – это изготовление катушек L2 и L3. Наматывались они на шаблоне, представляющем из себя основание (лист фанеры) с торчащими из него штырьками. Штырьки должны обеспечивать намотку рамочной катушки с внутренними размерами 150х70 мм и наружными – 150х150 мм. Всего наматывалось 140 витков (диаметр провода 0,1 мм), причем на участке dX (см. Рис.2б) витки распределялись равномерно, например, 20-ю группами по 7 витков. По мере намотки витки приклеивались полосками из папиросной бумаги к предварительно подложенному бумажному листу. В итоге получилась почти плоская катушка с «распределенной» стороной. Две таких катушки, повернутые друг относительно друга на 90o, склеивались между собой и закреплялись в планшете.
Для уменьшения паразитных наводок со стороны рук оператора, на верхнюю стенку планшета наклеивался экран из тонкого провода, проложенного в виде мелкой «змейки» и который подключался к общему проводу (экран из сплошной фольги не годится, так как вносит большое затухание).
В качестве корпуса планшета были использованы листы белого пластика и полосы, вырезанные из органического стекла. Для корпуса мыша была использована крышка от мыльницы.
Налаживание манипулятора свелось к проверке работоспособности генератора, правильной фазировке катушек и установке порога чувствительности приемного устройства (подбором номинала R4) для устранения паразитного участка на характеристике.
Схему можно еще больше упростить, отказавшись от утомительной операции намотки катушек и заменив управляемый генератор тока переменным резистором, как это показано на Рис.4.
Теперь если скрепить оси двух таких резисторов между собой, корпус первого резистора закрепить на жестком основании, а корпус второго – на рукоятке, то получим пропорциональный джойстик (см. Рис.5), обеспечивающий выдачу координат с использованием того же принципа формирования импульса и того же программного обеспечения. Степень поворота резисторов при их окончательном закреплении надо определить экспериментально, по соответствию вертикального положения ручки центральному положению курсора на экране. Для создания иллюзии свободного движения рукоятки, ее ось и оси обеих резисторов должны пересекаться в одной точке. Резисторы – любые непроволочные с характеристикой типа «А». Особенностью схемы является ее питание не от отдельного источника +5В, а от линии START, на которой в течении периода опроса присутствует уровень лог.1.
Недостаток такого устройства – в постепенном износе переменных резисторов и нарушении контакта движка, приводящих к сильному дрожанию курсора на экране.
|
|
|
|
Было опробовано несколько алгоритмов опроса, в результате которых я сделал следующие выводы:
1. Время опроса не должно зависеть от текущих координат – чтобы легче было задавать интервалы времени в прикладных программах.
2. Координаты X и Y должны измеряться одновременно, в едином цикле – для сокращения времени опроса. Это позволяет повысить как
быстродействие, так и разрешающую способность манипулятора.
Алгоритм опроса показан на Рис.6. Линия START подключалась к разряду 0 пользовательского порта компьютера, а линии X, Y, RIGHT, LEFT - к разрядам 0,1,2,3 (у «БК-0010» восьмиричный адрес этого порта равен 177714, а шина данных – инверсная). Регистры общего назначения микропроцессора обозначены как R0, R1, R2 и R3, а признак переноса – как С. Из-за влияния шумов, наводок и прочих факторов, алгоритм был дополнен цифровой фильтрацией вида Rn=(X+Rn-1)/2, которая значительно ослабляла «дрожание» координат. О состоянии кнопок мыша можно было узнать, анализируя биты 2 и 3 порта 177714.
Был написан код драйвера, который дополнительно еще выводил на экран стрелку-курсор формата 8х9 точек. Длина этого драйвера получилась 200 байт, а сам цикл опроса координат удалось сократить до 15 мс. Этот драйвер был использован в моем графическом редакторе SPLINE, драйвер также удалось внедрить в популярную игру «Реверси».
Эксплуатация манипулятора в течение длительного времени показала достаточно хорошие его характеристики. Впоследствии был добавлен буферный каскад на логической микросхеме 133ЛА3 для придания импульсам большей стабильности.
Данный метод позволяет очень просто сопрягать различные аналоговые устройства с персональным компьютером, где не требуется
высокое быстродействие. Впоследствии я предпринял попытку оцифровать медленноменяющиеся сигналы, каковыми являются
биопотенциалы мышц сердца (электрокардиография).